水中小型ビークルと無人飛行艇間の音響通信および無人飛行艇の自動着水に成功
2026年06月09日
国立研究開発法人海洋研究開発機構
新明和工業株式会社


1.発表のポイント
- 海空の無人機間で直接通信に成功
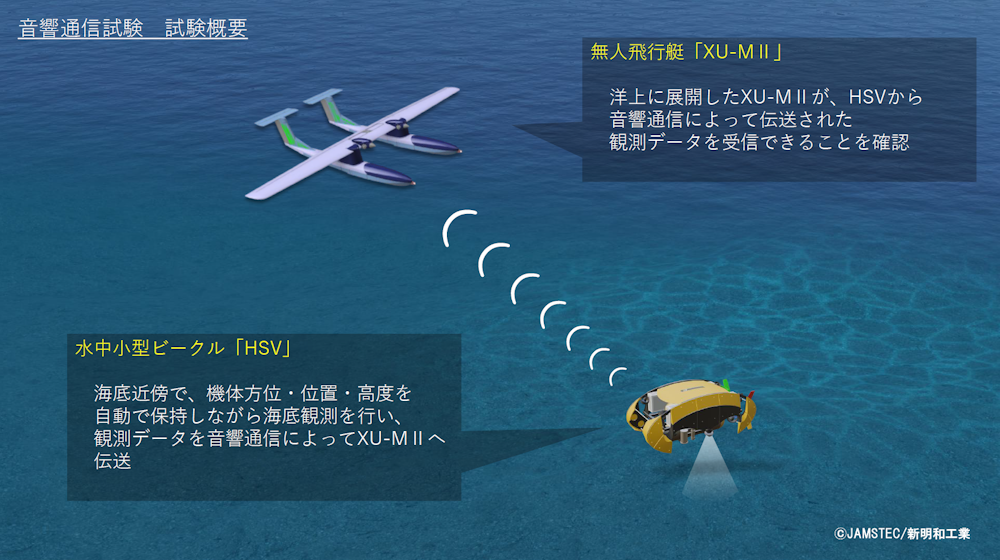
潜航中の水中小型ビークルによる観測データを、音響通信装置を介して、洋上の無人飛行艇で直接回収することに成功しました。
- 自動化技術の実証
無人飛行艇による自動飛行と海面への自動着水にも成功し、将来の海洋調査等の無人化に向けた自動化技術の有効性を確認しました。
- 海洋調査の効率化
海と空の無人機を組み合わせた革新的な海洋調査システム「海空無人機」に本技術を活用することで、継続的な海中調査や迅速なデータ回収が可能となり、我が国のEEZ(排他的経済水域)等における調査能力の飛躍的な向上が期待されます。

2.概要
国立研究開発法人海洋研究開発機構(理事長 河村 知彦 以下、「JAMSTEC」)技術研究開発部門 海空無人機技術開発センターの井上 朝哉 センター長らと、新明和工業株式会社(本社:兵庫県宝塚市、代表取締役 取締役社長 槶原敬士(くにはらたかし)<新字体では「椢原」と表記>) 以下、「新明和工業」)は、2026年4月に兵庫県阪神港 芦屋沖において、水中小型ビークル「HSV」※1(以下、「HSV」)と無人飛行艇「XU-MⅡ」※2(以下、「XU-MⅡ」)とを用いた試験を共同で実施しました。
本試験では、洋上のXU-MⅡと海中に潜航し観測中のHSVとの間で音響通信※3を確立し、HSVが撮影した海底画像を含むデータを、無人の航空機であるXU-MⅡがリアルタイムで回収することに成功しました。また、実海域でのXU-MⅡの自動飛行および自動着水も成功させました。
本成果は、経済安全保障重要技術育成プログラム(K Program)※4において、JAMSTECや新明和工業等が国立研究開発法人科学技術振興機構から受託している研究開発課題「海空無人機による海洋観測・監視・調査システムの構築」の一環として得られたものです。
今回の試験で獲得した知見は、「海空無人機」の実現可能性を示し、広大な海域における各種海洋調査の大幅な効率化と迅速化をもたらす可能性を秘めています。
用語解説
- ※1水中小型ビークルHSV
JAMSTECが所有する試験評価用水中小型ビークル
概略寸法:全長1.4m×全幅0.7m×全高0.6m
空中重量:約100kg
最大潜航深度:200m
観測装置:光学カメラ(機体下向きに搭載) - ※2無人飛行艇 XU-MII
新明和工業がデータ収集および課題把握を目的として実機の「1/5スケール」で開発した無人飛行艇
寸法:全長 3.86m × 全幅 5.5m × 全高 1.05m
推進系統:双発エンジン・プロペラ
ペイロード:10kg~
巡航速度:72km/h - ※3音響通信
海中では、電磁波は吸収されてしまうため、近距離の場合を除いて、通信や測位には音波が用いられる。通信とは、観測データなどの任意の信号を伝送すること、測位とは、既知の信号のやりとりにより距離や角度を測って位置を計測することをいう。詳細は以下を参照のこと。
- ※4経済安全保障重要技術育成プログラム(K Program)
我が国が国際社会において中長期的に確固たる地位を確保し続ける上で不可欠な要素となる先端的な重要技術について、研究開発およびその成果の活用を推進するため、内閣府主導のもと創設された国のプログラム。詳細は以下を参照のこと。
https://www8.cao.go.jp/cstp/anzen_anshin/kprogram.html
また、K Programにおいて実施している当研究開発課題「海空無人機による海洋観測・監視・調査システムの構築」については以下を参照のこと。



音響通信試験時の動画
3.背景
広大なEEZを有する我が国では、資源探査、海洋のモニタリング、災害時(海底火山噴火等)の情報収集、海底捜索など多領域での調査対応が求められます。これら調査を効果的かつ安全に行うには従来の有人船舶による運用を補完・代替する、無人機による機動的な調査システムが不可欠です。
JAMSTECを代表機関とし、新明和工業、いであ株式会社、国立研究開発法人海上・港湾・航空技術研究所が参加する共同チームは、経済安全保障重要技術育成プログラム(K Program)において、無人飛行艇を用いて自律型無人探査機(以下、「AUV」)を目標海域へ迅速に運搬・投入し、AUVによる海洋調査終了後は自動で揚収・帰還する「海空無人機」の技術開発を進めています。この技術開発では、飛行艇の自動着水技術およびAUVの自動揚収技術が海空無人機の実現性を左右する重要な技術と位置付けられており、この中でも、飛行艇とAUV間の音響通信は、AUVの調査潜航や揚収プロセスにおいてデータ伝送を行う、中核的な役割を果たします。
この技術開発では大型機体の製作と技術実証試験を予定していますが、まず既存機やスケール機を用いて技術実証を段階的に行うため、2026年4月9日に芦屋沖にて、XU-MⅡの自動飛行・着水試験およびXU-MⅡとHSV間での音響通信により、HSVの情報や観測データをXU-MⅡへ伝送・回収する試験を実施しました。
4.成果
本試験において、以下の成果を得ました。
- 1XU-MⅡとHSV間の音響通信・データ伝送に成功
HSVが水深約15mの海底近傍で自動的に位置・方位・高度を保持しながら海底をカメラ撮影し、取得した画像および機体ステータス情報を、搭載した音響通信装置を用いてXU-MⅡにリアルタイムで伝送し、海中で得た観測データを洋上で無人の飛行艇が即時に回収できることを実証しました。
- 2XU-MⅡの自動着水に成功
XU-MⅡに搭載されたフライトコントロールシステム※5で機体の自動制御を行い、自動着水を達成しました。本成果は、将来の実証機を外洋の波浪中で自動着水させるための基盤技術となります。
(1)と(2)の成果の活用により、AUV等が潜航と調査を継続したまま、無人飛行艇等を海域に展開して観測データを回収し陸上の運用者に転送する、といった海と空の無人機を連動させる運用が可能となります。
用語解説
- ※5フライトコントロールシステム
航空機の姿勢や高度、方位などを制御するための操縦装置の総称。 無人航空機においては自動飛行を行う際、各種センサからの情報を基に必要な舵角等を演算し、舵面や推力のアクチュエータを動作させる。
5.今後の展望
本プロジェクトでは、風浪環境下においても安定した自動離着水を実現する技術や、AUVの自動投入揚収技術をはじめ、AUVの軽量化および高精度な位置制御技術、複数の無人機を統合的に運用する技術の開発を進めています。2028年度にはこれら要素技術を統合した、海空無人機の小規模な試作システムによる海域試験を実施する予定です。2033年度には実証システム(全長17.5m程度の無人飛行艇に全長4m程度のAUV搭載を想定)により、最終的なアウトプット目標の達成(航続距離片道200海里、調査水深2,000m等)を目指します。今回の試験で得られた知見は今後の技術開発に反映させることで、より実用性の高い技術へと発展させてまいります。
将来的には海洋大国・日本における安全で効率的な海洋調査の実現に貢献することを目指し、海空無人機および開発の過程で創出した技術を資源探査、海洋インフラ等監視、防災、海底捜索など多様な分野へ展開してまいります。
本件に関するお問い合わせ先
国立研究開発法人海洋研究開発機構
本研究全体、無人探査機および音響通信について
技術研究開発部門 海空無人機技術開発センター センター長 井上 朝哉
報道担当
新明和工業株式会社
無人飛行艇について
報道機関の方
以上
このコンテンツに掲載している内容は、発表日現在の情報です。
これらの情報は、当社グループの事業戦略および組織の変更などにより、最新の情報と異なる場合がありますのでご了承ください。