業界初 二・多段方式駐車設備への自動運転自動車による自動後退駐車に成功、併せて、機械式駐車設備への自動バレーパーキングの技術も確立
2021年03月28日
新明和工業株式会社(本社:兵庫県宝塚市、取締役社長:五十川 龍之、以下:新明和工業)と国立大学法人 群馬大学(学長:平塚 浩士、以下:群馬大学)は、2017年12月から「自動運転自動車※1(以下:自動運転車)の機械式駐車設備利用実現に向けた共同研究」を開始し、2019年7月にはエレベータ方式駐車設備を想定した検証用装置への自動前進駐車を業界で初めて成功させるなど、これまで研究を進めてきました。このたび、新たに新明和工業の本社敷地内において、エレベータ方式と二・多段方式の機械式駐車設備への自動運転車の自動入出庫、および複数の通信と誘導方法の組み合わせによる、この2つの設備間の自動走行を実現する車路管制システムの実証実験を行い、次の3項について成功しました。
- 業界初となる二・多段方式駐車設備への、後退(バック)駐車技術の確立
- 地下等のGPSが使用できない空間を想定した、独自の「車両誘導システム」の構築(車路管制機能を含む)
- エレベータ方式、および二・多段方式駐車設備の入庫扉の開閉動作まで含む自動バレーパーキング※2
上記3項の実現により、今後の自動運転車の普及やこれに伴う社会変化を想定し、通信環境や誘導方法を機械式駐車設備とその周辺インフラ側で整え、自動運転車と協調させることで、安全に配慮しつつ高い精度で自動運転車を機械式駐車設備まで誘導し、駐車する技術を確立しました。
本技術の適用により、GPSが届きにくい地下空間、マップ情報のない私有地などでも自動バレーパーキングが可能となり、その結果、機械式駐車設備内をはじめ、車路導線を含む駐車エリアへ人が立ち入る必要がなくなることから、人身事故が生じるリスク要因を排した、安全で便利な機械式駐車設備の実現に近づきました。
- ※1自動運転自動車:ここでは、群馬大学が所有する実験用の車両を指す
- ※2バレーパーキング:ホテルなどで実施されている、自動車等の入出庫を代行するサービス
1. 今般の研究成果
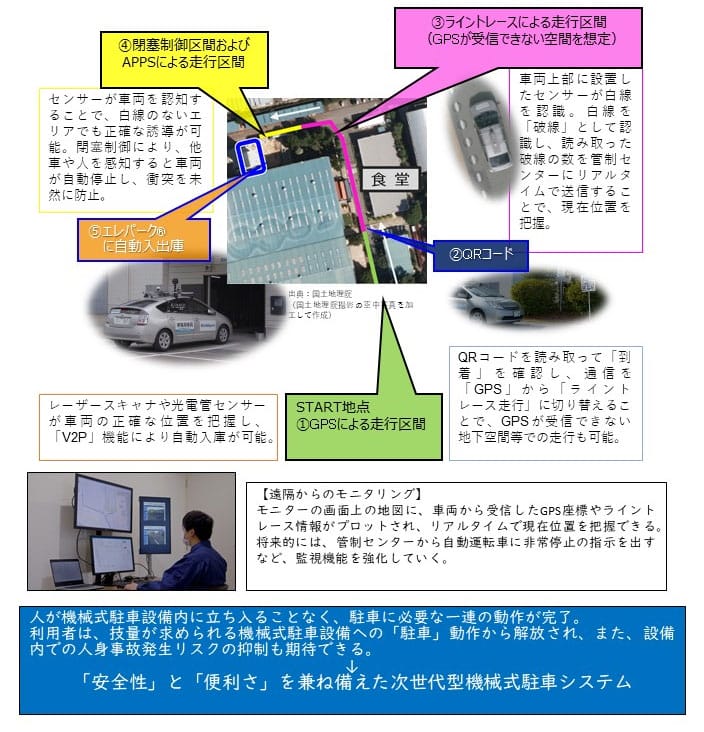
- 私有地を想定したエリア(GPS電波受信不能領域含む)において、GPSを活用した自動運転走行から独自技術の車路管制システムによる誘導走行、エレベータ方式および二・多段方式駐車設備への入庫ならびに出庫に至る一連の動作検証について成功
- 新明和工業 本社敷地内の前面車路が狭い二・多段方式駐車設備(試験機)において、業界で初めて自動運転車による「後退(バック)駐車」の実証実験に成功
- 車路管制および閉塞制御機能を有した「車両誘導システム」の開発により、ランドマーク(QRコード)やライントレース、センサーを用いて自動運転車を正確に機械式駐車設備まで誘導し、自動扉の開閉を含む一連の駐車操作までを自動化
- APPS(Advanced Pilot Parking System)を活用した閉塞制御により、自動駐車時の前後車両や人物との衝突を未然に防止
- 今般の一連の技術確立により、人の手を介さず機械式駐車設備への自動バレーパーキングが可能となり、駐車に関するトラブルや人身事故発生リスクを抑制
- 群馬大学では、今般の実証実験で得られた成果も含め、更なる自動運転社会の実現に向けて研究を加速する
- 新明和工業では、今回確立した技術の利活用を含め、手動運転車と自動運転車が混在する社会を想定した研究開発フェーズに移行するとともに、駐車場周辺の車路管制を含めたシステムの構築、駐車場に関するソリューションビジネスなど、「駐車」に関わる新たなビジネスへの展開を探索している
2. 本研究における成果(詳細)
(1)業界初 自動後退(バック)駐車の実現 ~自動運転車と機械式駐車設備の協調~
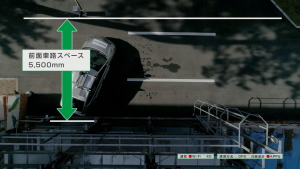
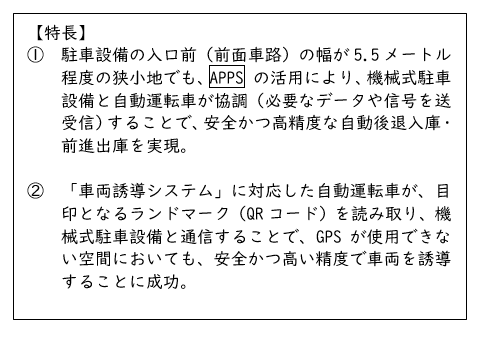
今般共同開発したAPPS(Advanced Pilot Parking System)と「V2P」(自動運転車(V)と機械式駐車設備(P)の間を通信で繋ぐシステム)の運用により、自動運転車と機械式駐車設備が協調(必要なデータや信号を送受信)し、安全かつ高い精度で自動運転車を駐車スペースに誘導します。具体的には、前面車路幅が5.5メートルの狭小地において、自動運転車に切り返し操作を行わせることで、2019年に成功した自動前進駐車と比べて、より高度な運転技術が求められる後退(バック)駐車での自動入庫を実現しました。
この結果、より広範な駐車場に対応する技術を確立するとともに、未来社会における機械式駐車設備の可能性が拓けました。
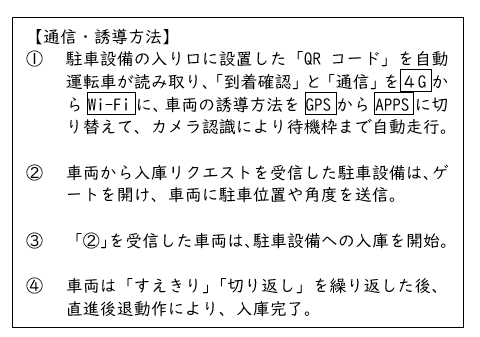
「通信・誘導方法」とその特長
前面車路が5.5メートルの二・多段方式駐車設備への自動後退(バック)駐車


(2) 機械式駐車設備への自動バレーパーキングシステムの構築 ~設備周辺から入出庫に至る一連の動作を自動化~
新明和式自動バレーパーキングの特長
- 1車路部分から機械式駐車設備までの自動運転車の誘導について、インフラ側でランドマーク(QRコード)、ライントレースなどを用いて、Wi-Fi、4Gなどその場に適した通信方法を組み合わせた自動運転車管制システムを構築(「車両誘導システム」)。
- 2LiDARによる閉塞制御の確立により、安全性も確保。
- 3駐車の場面では、自動運転車と機械式駐車設備の通信によりパレットの呼び出し、出入口ドアの自動開閉まで一連の動作を自動化。
今般実証実験を行った主なルートは以下のとおりです。
3. 群馬大学との「自動運転車の機械式駐車設備利用実現に向けた共同研究」来歴
| 2017年12月 |
|
|---|---|
| 2018年9月 |
|
| 2019年夏 |
|
| 2019年冬 |
|
| 2020年夏 |
|
| 2020年12月 |
|
| 2021年2月 |
|
4. 技術用語解説
- APPS(Advanced Pilot Parking System)
-
「V2P」の確立により、安全で高精度な自動駐車を実現
- 1業界初となる、自動車と機械式駐車設備間の通信プロトコルの開発
今般開発した通信プロトコルにより、自動車と機械式駐車設備間の双方向通信が可能となり、機械式駐車設備側が、自動運転車を駐車位置まで的確に誘導
- 2レーザースキャナ(LiDAR)を応用した車両位置特定アルゴリズムの開発
レーザースキャナから得られる点群データに基づき車両位置を10㎜単位で認識し、自動運転車を安全かつ正確に駐車位置まで誘導
- 3手動運転車と自動運転車の混在走行環境にも適応
自動運転車が普及するまでの過渡期には、手動運転車と自動運転車いずれにも対応
- 1業界初となる、自動車と機械式駐車設備間の通信プロトコルの開発
報道機関からのお問い合わせ先
新明和工業株式会社
経営企画本部 広報・IR部
国立大学法人群馬大学
研究推進部産学連携推進課 荒牧センター事務室
027-220-7443(直通)
本実証実験に関するお問い合わせ先
新明和工業株式会社
パーキングシステム事業部 事業企画室
以上
このコンテンツに掲載している内容は、発表日現在の情報です。
これらの情報は、当社グループの事業戦略および組織の変更などにより、最新の情報と異なる場合がありますのでご了承ください。