ノンスイッチング ドライバ
ノンスイッチング ドライバは、ディスク検査装置などの回転機構であるエアスピンドルの回転を制御する装置です。パソコンや情報家電などで多用されるハードディスクを製造・検査する装置が微小信号を扱うことから、電磁ノイズの低減がノンスイッチング ドライバの重要な課題となっているほか、精度の高い回転速度への対応が求められています。
当社は、モータを駆動するパワー素子をノンスイッチング(リニア)動作にすることによりノイズの発生を抑制し、エンコーダ信号※1によりPLL制御※2による高精度の高速回転を実現したノンスイッチング ドライバを提供しています。
- ※1エンコーダ信号:スピンドルに搭載した回転速度を検出するためのエンコーダから出力される回転速度に応じた矩形状のクロック信号
- ※2PLL制御 :上位の装置から指令される回転基準クロックとエアスピンドルに内蔵したエンコーダパルスを同期化させることで、高い速度精度を維持させる方法
NS20-A
ON/OFFノイズを嫌う微小信号を測定するアプリケーションに最適!

- スイッチングノイズのない環境を実現
- ノンスイッチング(リニア)タイプのパワー素子を搭載
- 高応答の電流制御
-
PLL制御、トルク(電流)制御モードを搭載。
制御ループの制御周期が10μsと短く、高精度な制御を実現できます。
CLV(線速度一定速度制御)にも対応。- ※CLV(Constant Liner Velocity):
HDD・DVDなどのディスク検査装置において、ヘッドの位置によってディスクの回転速度を変化させ、ヘッドがディスクをなぞる速度を一定に保つ回転制御。
- ※CLV(Constant Liner Velocity):
- モータ対応範囲の拡大、エンコーダパルス対応範囲の拡大
- モータ極数は当社BUILT-IN DDの極数(4~42極)すべてに対応します。エンコーダは一回転当たり100万パルスまでのパルス数に対応できます。また、信号周波数は最大5MHzまで受けることができます。
- 欧州RoHs指令に対応
- 欧州連合EUによる指令「RoHS指令」(電子・電気機器における特定有害物質の使用制限についての指令)に対応しております。
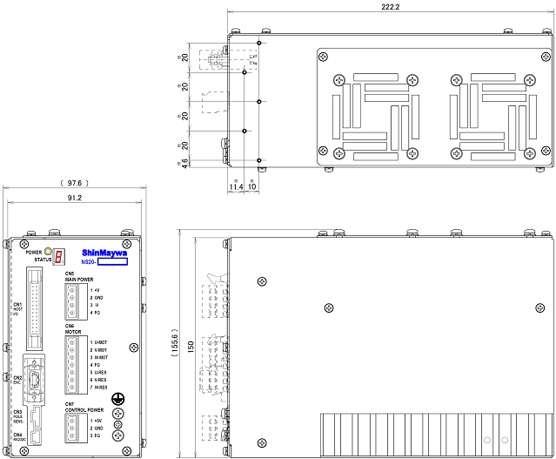
外形寸法図
(単位:mm)
ここではドライバの外観および寸法を示します。
図1は、外観およびドライバ寸法を示します。
図2は、取付けのためのM3タップ取り合い寸法を示します。
質量:約3kg
- ※印付き寸法は、旧品(NS20-**)のM3タップ取り合い寸法と同一です
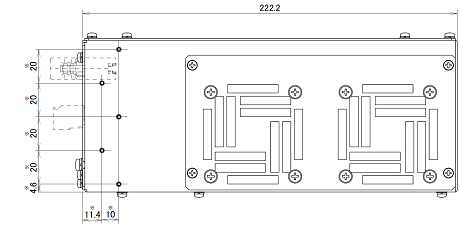
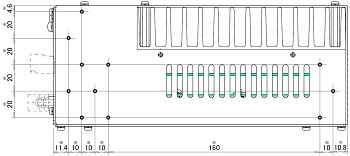
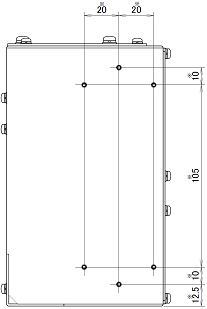
図2 取付寸法図
本装置固定用M3ネジの長さは5~6 mm+取付板厚さとしてください。長すぎると、内部の部品に接触する可能性があります。
主な仕様
| 項目 | 仕様 | |
|---|---|---|
| 形式 | NS20-A | |
| 適用モータ | 三相同期モータ※1 | |
| 適用エンコーダ | インクリメンタルエンコーダ(最大5MHz)※1 | |
| 電源 | 主電源 | ±24V(8.5A以上) |
| 制御電源 | +5V(1A以上) | |
| 出力電源 | 最大出力 | 8Apeak |
| 連続出力 | 5Apeak(極低速時4.5Apeak)※2 | |
| 制御内容 | 出力段方式 | ノンスイッチング(リニア)動作インバータ 正弦波電流制御 |
| 制御モード |
|
|
| 制御入力 | 回転指令、方向指令、リセット など | |
| 制御出力 | エンコーダパルス(A,B,Z相)、PLLロック、モータ停止、アラーム など | |
| 回転むら | 0.001% 以下※4 | |
| 異常検出 |
など7segLEDに表示 |
|
| 異常時制動 | ダイナミックブレーキ(抵抗内蔵) | |
| 使用周囲環境 | 温度:0~40℃(動作時、ドライバ周囲温度) 湿度:85%以下(結露なきこと) 電子回路に有害な雰囲気中に設置しないこと (腐食性ガス、金属粉、水分、油分など) |
|
| 保存温度 | 温度:−15~80℃(ドライバ周囲温度) 湿度:85%以下(結露なきこと) |
|
| 冷却方法 | 強制空冷(冷却ファン内蔵) | |
| 質量 | 3kg | |
- ※1適用の可否は、個別に判断します。
- ※2起動初期や停止寸前のほとんど止まっているような状態では、電流制限値が8Apeakから4.5Apeakに自動的に切り替わります。
以下の計算式で導き出される回転速度以下を示します。
(4[Hz]/(極数/2))×60[r/min] - ※3エンコーダパルスの分割精度が不十分な場合に使います。
- ※4負荷や回転速度によっては、0.001%以上になることがあります。
お問い合わせ先
製品に関するお問い合わせはこちらからお願いいたします。
ほかの製品・サービスを探す
ShinMaywa INSIGHT